Playful tennis ball dog robot
Summary
As a fun little hobby project, I'm building a small rover that will automatically chase a tennis ball through the house, striking it at a random angle each time it gets close so that ball changes position and the game continues.
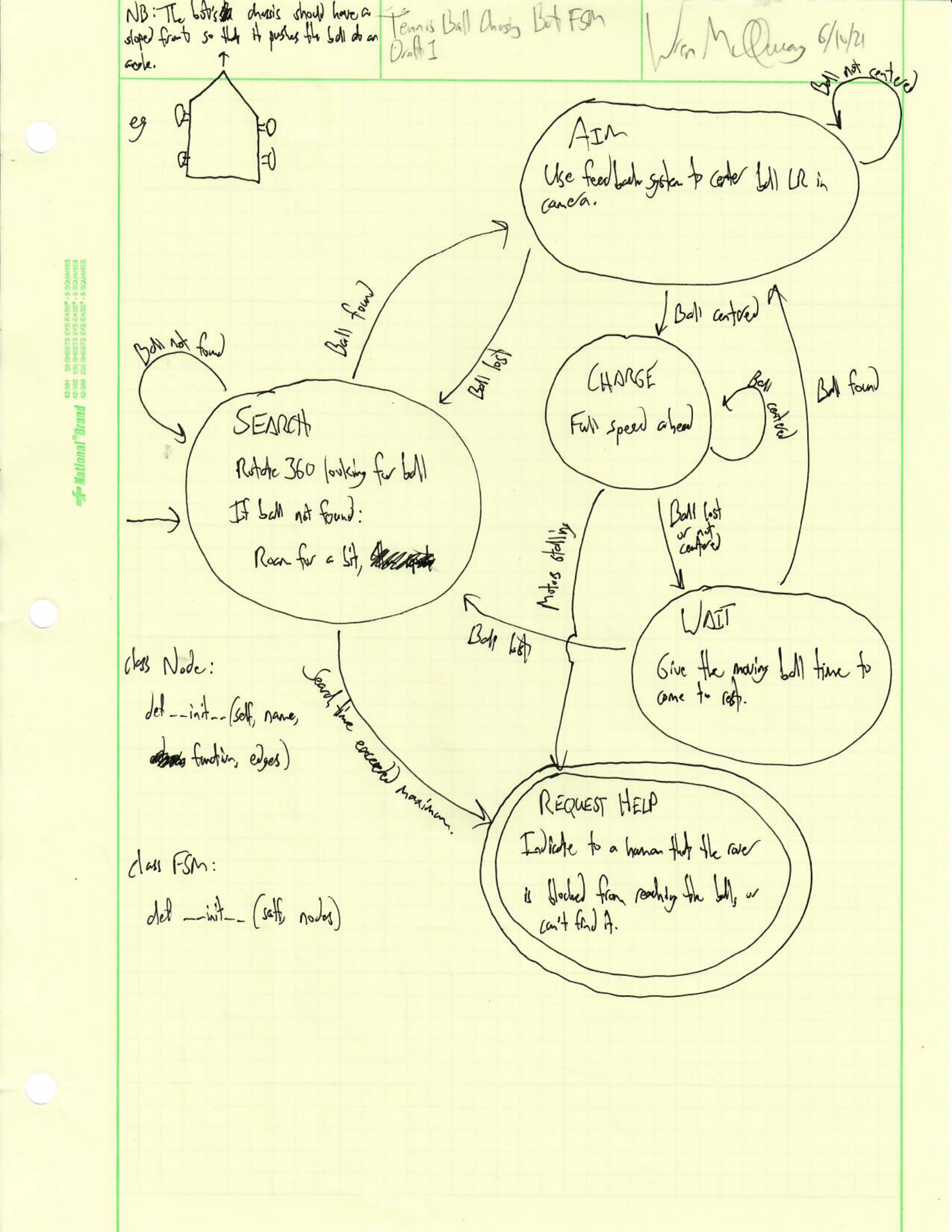
I'm modeling the robot's decision-making as a finite-state machine, allowing it to switch freely between different modes as the situation warrants. These modes include search, aim, charge, and request help (just in case it gets trapped behind a chair!).
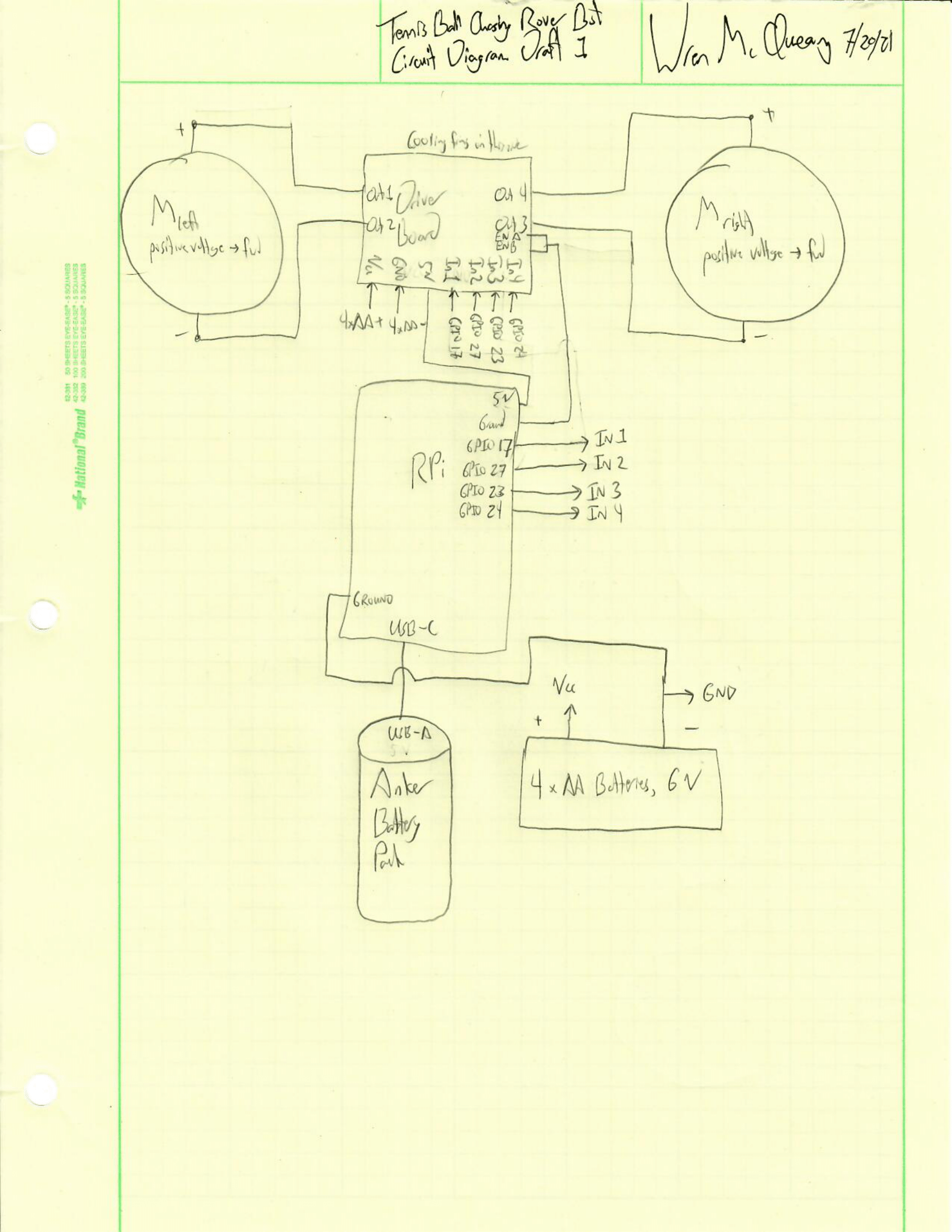
For now, the robot's circuitry is mostly breadboarded. I'm planning on compacting it into a few small printed circuit boards in the future.
I'm in the process of designing and 3D printing a chassis for the robot, with a front in the shape of a parabolic cowcatcher, so that the ball will be launched in a semirandom direction.
Skills gained
This project has helped me brush up on using finite state machines for practical purposes. It also served as a great teaching example for my time working at KID Museum, to show students how many aspects of design can come together to form a complete robot.