Telerobotics training
Summary
As discussed here, I collaborated with the DCXR Lab of Dr. Craig Yu at George Mason University, as well as the SubT Lab of Dr. Nick Wang at NYCU in Hsinchu, Taiwan, to build a robot for use in search-and-rescue missions. The robot is piloted remotely, and is designed to facilitate spatial interpretation of sounds, to assist its pilot in locating calls for help and other critical sounds with high accuracy.
To provide the pilot with rapid, easy, and effective field training, I pair-programmed a training simulation which provides the pilot with missions completed by a virtual simulacrum of the robot in Unity and Gazebo. This allows more pilots than robots to train at once, protects real robots from damage during training, and eliminates the need for a painstakingly orchestrated real training environment.
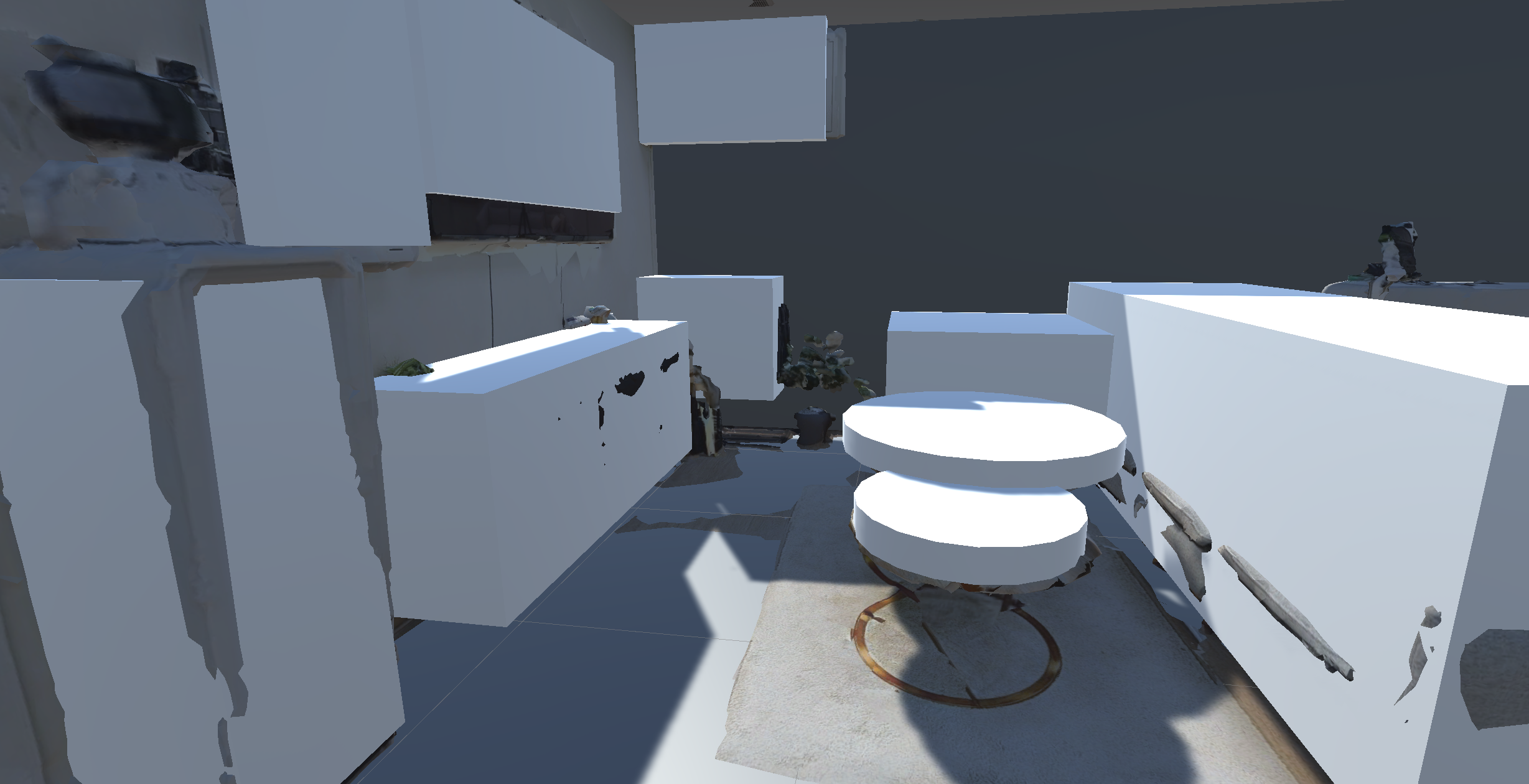
In the virtual environment, realistic acoustics are paramount, due to the importance of sound in a real search-and-rescue mission. To this end, we engineered our training simulation to provide realistic propagation of stereo sound, including material-attentive occlusion and reflection. After importing the geometry for an environment (acquired via photogrammetry) into Unity, we overlaid each acoustically significant object with an invisible double. Each object's double contained information on its material and other acoustic properties, allowing it to realistically influence the acoustics of the space.
See below for an image of one of our environments, along with another image in which the invisible acoustic doubles are revealed.

Skills gained
By engineering realistic acoustics for our training simulations, I learned how to use state-of-the-art acoustic tools such as Resonance and FMOD.